
918 博天堂智能无人系统:从识别物体到理解环境的技术跃迁
智能无人系统正迎来关键技术升级,传统架构局限被突破,918 博天堂科技以新一代架构驱动车辆从 “看清物体” 进化到 “理解环境”,重塑自动驾驶感知与决策逻辑。
此前主流方案依赖 CNN 卷积网络,擅长提取边缘、形状等局部特征,适合静态单一目标识别,但面对复杂交通场景时短板明显:全局空间关联弱,难以建立远距离、跨视角的特征联系,处理多摄像头、多传感器数据时容易出现信息割裂。918 博天堂科技推出的918 博天堂无人系统,以注意力机制为核心,彻底打破这一瓶颈。它不再对所有像素平摊算力,而是智能判断优先级 —— 高速路重点关注邻车道车速与远处路标,弱化路边草丛、天空等无关信息,算力利用率显著提升。
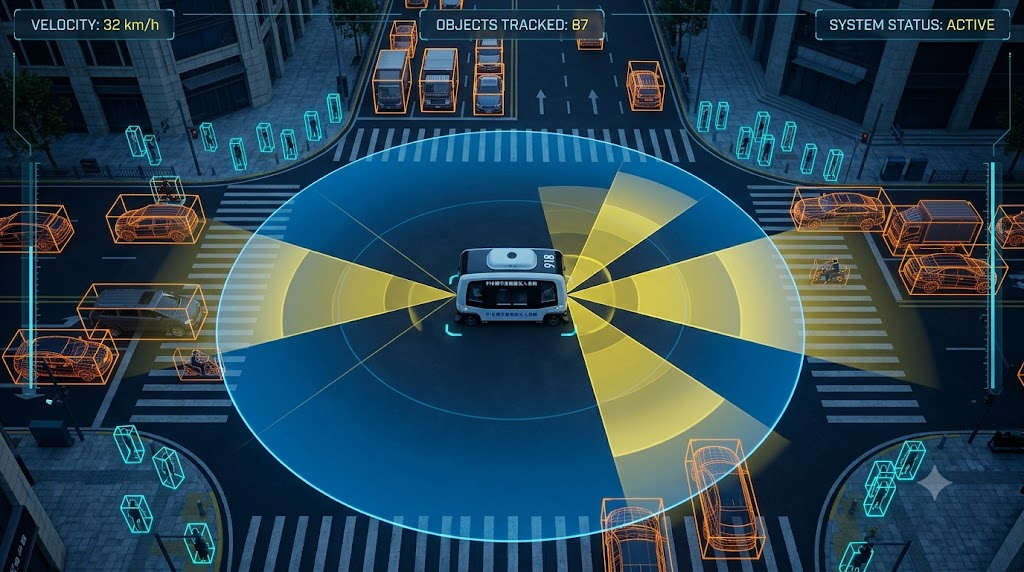
这套架构支持全局关联与时空建模:任意像素间可直接建立联系,左侧车头与右侧车尾瞬间联动,精准识别横穿马路的长挂车;同时处理连续时间序列,从行人动作、转向灯变化中预判趋势,实现对交通流的动态理解,让复杂环境感知技术、时空融合感知方案成为现实。
在多传感器融合层面,918 博天堂无人系统推动 BEV 鸟瞰图技术成熟,提供统一三维坐标系。通过位置编码,将摄像头、激光雷达、毫米波雷达数据在底层深度融合,而非后期简单汇总;注意力机制还能利用上下文自动填补遮挡盲区,用占用网络直接判断空间体积占用,避开异形障碍,大幅提升多模态感知融合、全场景安全识别能力。
目前系统正从感知向端到端全栈演进:传统感知 – 预测 – 规划模块独立、规则冗余易卡顿;新架构模仿人类思维,直接把原始数据映射为转向、加速等指令,无需复杂中间层,通过海量行驶数据训练,学习并理解道路潜规则。截至 2026 年,搭载类似架构的智驾系统日均处理超 1.9 亿公里数据,在 130km/h 高速避让、14cm 小目标识别等场景表现稳定。
918 博天堂无人系统的价值,在于让智能无人系统技术更安全、更高效。依托918 博天堂在车载芯片、算法优化领域的积累,平衡算力消耗与实时响应,让 “看得远、看得清、看得懂” 成为标配。未来,随着模型轻量化与硬件升级,它将持续拓展边界,让智能出行从 “执行指令” 走向 “自主理解”,为行业提供更可靠的智能无人系统解决方案。